Juncheng Qian

Butterfly Lovers
October 2019
"Butterfly lovers" is one of my class projects for Mechatronics at UPenn. it is a telemetric remote manipulation device that allow the user to track the motion of one butterfly and synchronize the other butterfly's movement.
The flapping motions of the butterflies were achieved by two intricate linkage systems, and the motions were tracked and processed by a teensy board.
Love is Imitation
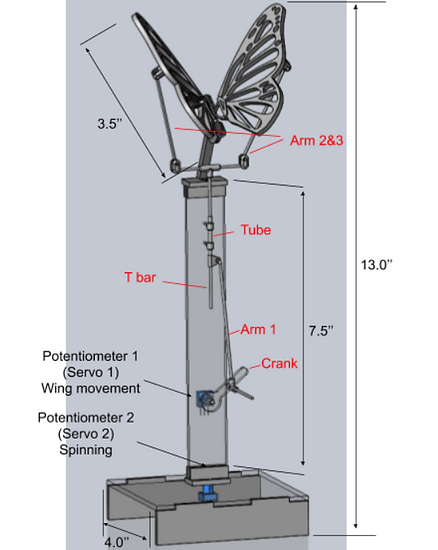
The mechanical designs of the input and output system are almost identical. Servo 1 controls the butterfly wings movement, and servo 2 spins the butterfly. A crank is directly attached to the driving shaft of servo 1, and arm 1 is connected to the crank and the T bar using hinge pins.
As the servo rotates, the linkage system converts the rotary motion into linear motion, and the copper tube regulars the T bar movements to the y axis, like a slider. The T bar drives the arm 2 and arm 3 which are connected to the butterfly wings and makes the wings rotates around the wing hinges, which imitates the flapping movements. In sum, the linkage system is a rotary-linear-rotary motion system.
Servo 2 is attached to the base and the driving shaft is connected to the main body, which spins the butterfly.
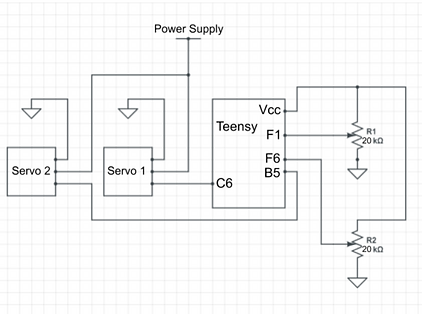
Teensy reads the changing values from the two potentiometers, and by utilizing the ADC on the ATMEGA32U4, I was able to map the signal to the servos in order to synchronize the two butterflies.


